Research Highlights
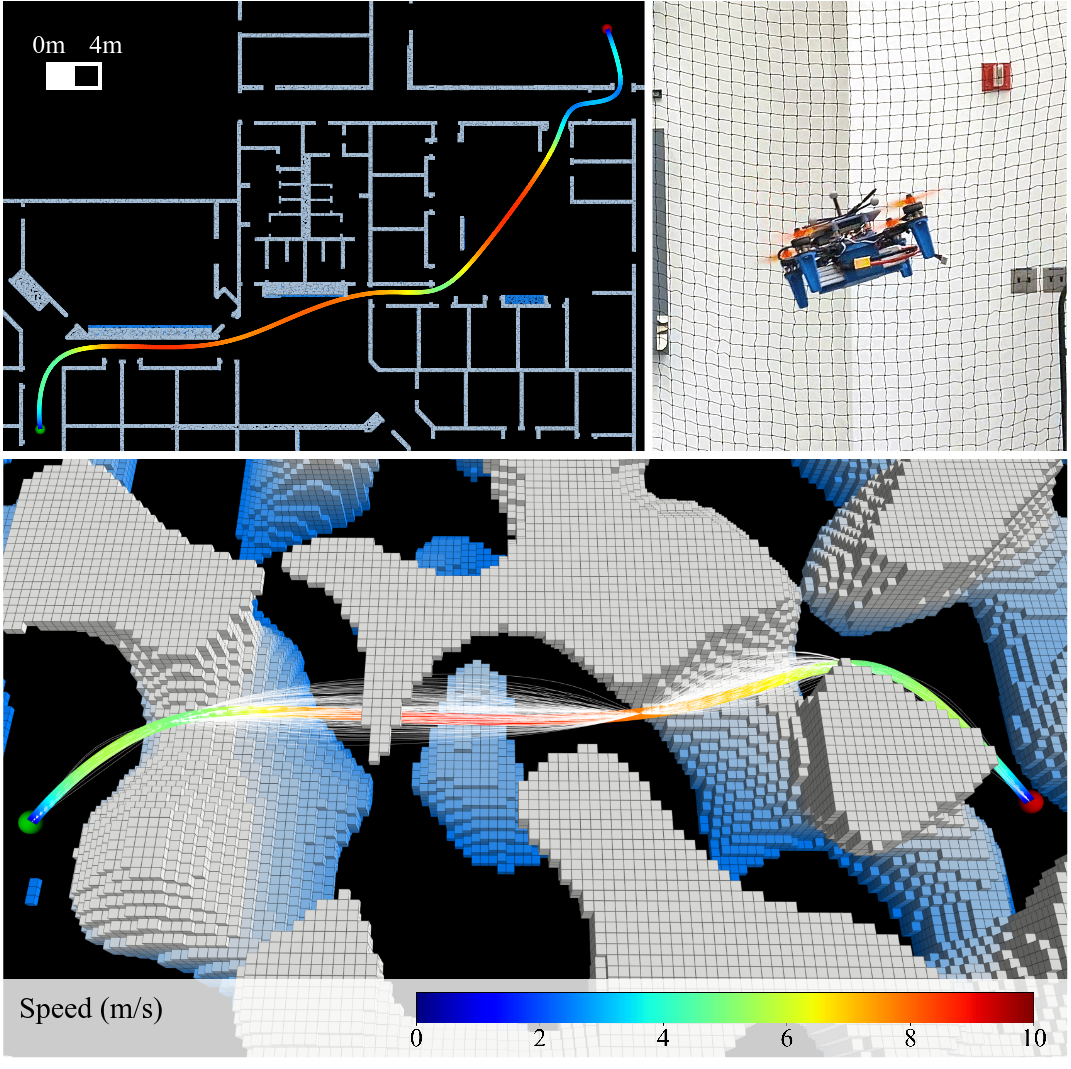
Real-time Trajectory Planning with Motion Primitive Search
H. Levy
This research project expands trajectory planning for vertical take-off and landing (VTOL) vehicles to long-range distances with real-time calculation. Research involves effective methods to smoothly connect motion primitives while preserving path optimality and retaining fast computation.
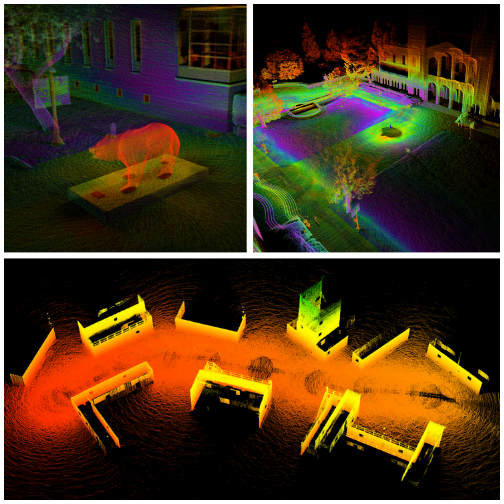
Submodular Optimization in LiDAR Perception for Mobile Robots
D. Thorne
This research uses submodular optimization to solve NP-hard problems in LiDAR perception with provably near-optimal performance. A key line of work involves development of a novel streaming submodular algorithm which can generate summaries for large mapping sessions and submaps for planning applications in under one second.
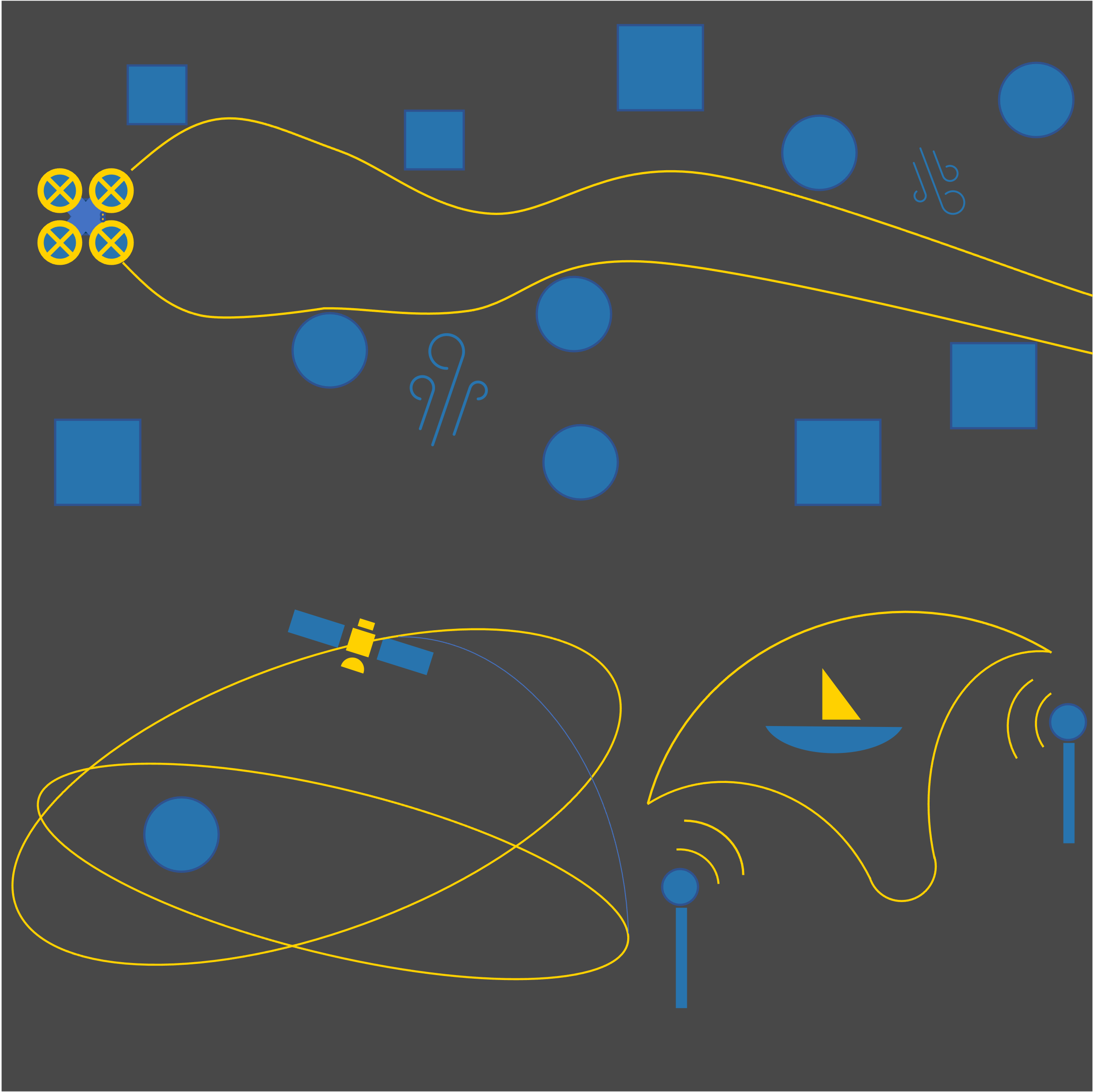
Geometric Methods for Planning and Control
S. Gessow
This research focuses on applying geometric methods to problems in planning and control. It includes work on contraction theory for adaptive control, information control barrier functions for integrating perception and control, and novel geometric methods for trajectory planning.
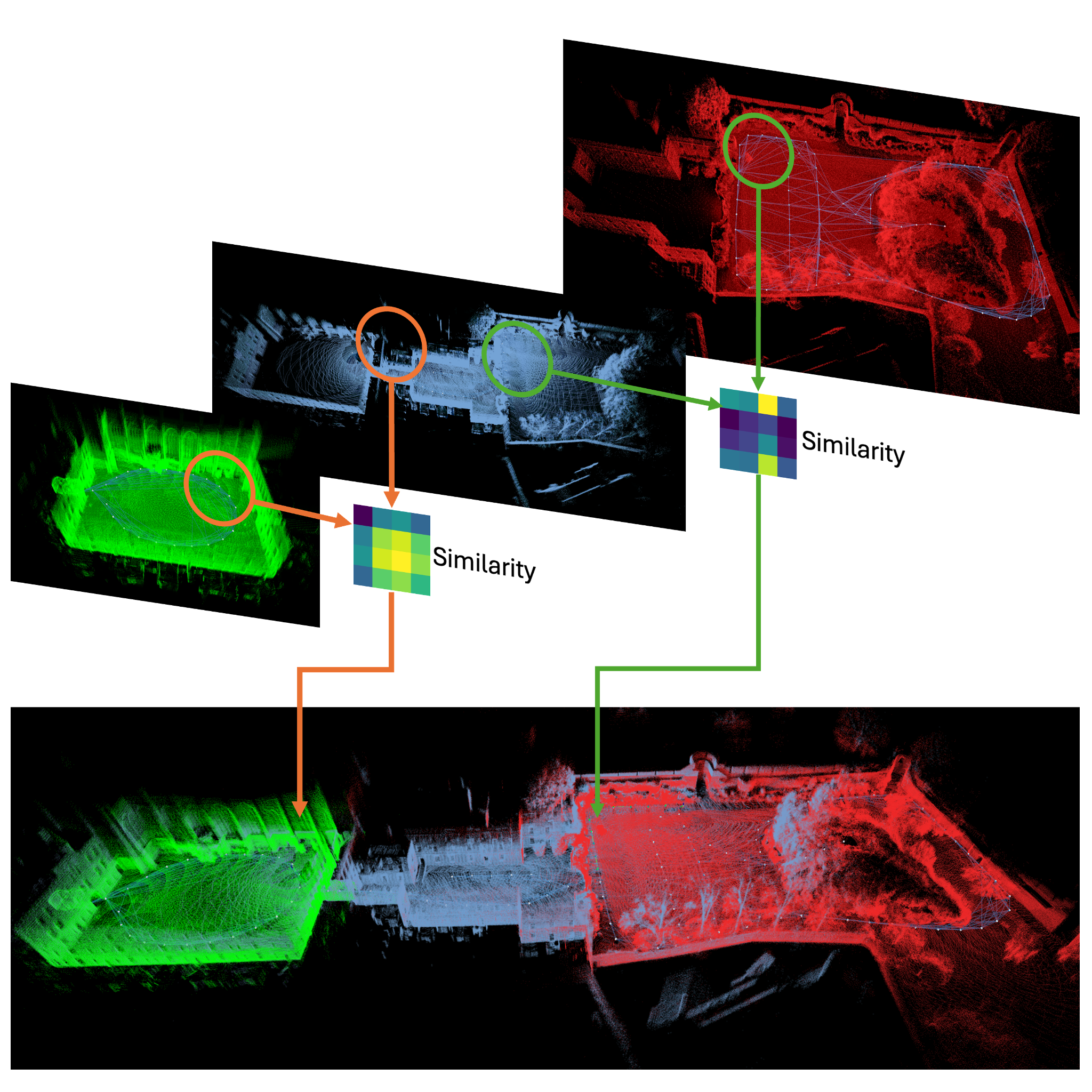
LiDAR-Based Place Recognition and Map Merging
Y. Ma
Abstracting geometrical information from a point cloud is important in the study of SLAM and planning. This research focuses on LiDAR-based place recognition (LPR) and map merging. The potential research topics include learning-based LPR, multi-agent map merging, and map sharing.